

地址:
天津市东丽区华明大道22号企业公元4栋

AWU405车载AI边缘计算机采用“MCU+SOC”双系统架构,可支持AGX Orin或RK3588平台,采用Ubuntu操作系统。面向道路巡查应用场景的轻量边缘计算设备,具有高计算性能、大容量存储、配置灵活、体积小、环境适应性强、易于维护管理等特点。

AI 算力可选200 TOPS(AGX Orin)或6 TOPS(RK3588)+48TOPS(灵汐HM100-B);支持WiFi6、5G、GNSS(内置IMU,支持RTK高精定位),支持IP相机、GMSL相机等常见传感器、外设接入,结合云端应用软件,实现自动识别各类道路病害并实时判定病害类型、坐标位置。

| 项目 | AWU405-A03 | AWU405-E01 | AWU405-F01 |
|---|---|---|---|
| SoC | NVIDIA Jetson AGX Orin | 瑞芯微RK3588 | 瑞芯微RK3588 |
| AI性能 | 200 TOPS(INT8) | 6 TOPS(INT8) | 6TOPS + 48TOPS(INT8) |
| GPU | 搭载1792个NVIDIA®CUDA*核心和56个Tensor Core的NVIDIA Ampere架构 | ARM Mali-G610 Mc4;内嵌高性能2D图像加速模块 | ARM Mali-G610 Mc4;内嵌高性能2D图像加速模块 |
| CPU | 8核Arm* Cortex*-A78AE v8.2 64位 CPU 2MB L2+4MB L3,最大频率2.2 GHz | 八核64位大小核架构,4*Cortex-A76 + 4*Cortex-A55 | 八核64位大小核架构,4*Cortex-A76 + 4*Cortex-A55 |
| MCU | NXP FS32K,ASIL-B | - | - |
| 内存/存储 | 32GB 256位 LPDDR5;64GB eMMC5.1 | 8GB LPDDR4X;64GB eMMC5.1 | 8GB LPDDR4X;64GB eMMC5.1 |
| 功能模组 | WiFi模块:WiFi6,同时支持AP、STA模式;GPS模块:支持IMU,RTK;5G:M.2封装(选配);SSD硬盘(选配) | - | - |
| NPU卡 | - | - | 灵汐HM100-B |
| 项目 | AWU405-A03 | AWU405-E(F)01 |
|---|---|---|
| 电源输入 | 1路,GND, BAT | - |
| 唤醒信号 | 1路,ACC | - |
| 视频输出 | 1路,HDMI2.1 Type-A | - |
| 视频输入 | 4路,GMSL2, 8MP*2或2MP*4相机 | - |
| 音频输出 | 1路,单喇叭5W | - |
| CAN | 5路,CAN2.0,兼容CANFD | 2路,CAN2.0,兼容CANFD |
| RS232/RS485 | 3路,RS232全双工*2;RS485半双工*1 | - |
| 按键信号 | / | 2路,按键开关 |
| USB接口 | 3路,USB2.0*2,USB3.0*1 | - |
| 以太网 | 4路,1000BASE-TX,独立网段,支持POE | - |
| I/O接口 | / | 2路,可配置成输入或输出 |
| GPS同步信号 | / | GPS 1PPS*1 GPS RS232 TX*1 |
| 车速/方向信号 | 1路,车速脉冲输入;1路,方向电平输入 | - |
| 电源输出 | 4路,9V/1A,9V/0.3A 5V/0.3A |
5V/0.3A |
| 天线接口 | 1组5G;1组WiFi;1组GNSS | - |
| 调试接口 | 1路,Debug Type-C,调试、烧录程序等 | - |
| 项目 | 参数 |
|---|---|
| 工作电压 | DC12V/24V ±20% |
| 工作温度 | -25℃~+70℃(AWU405-A03) |
| -30℃~+70℃(AWU405-E01) | |
| -25℃~+65℃(AWU405-F01) | |
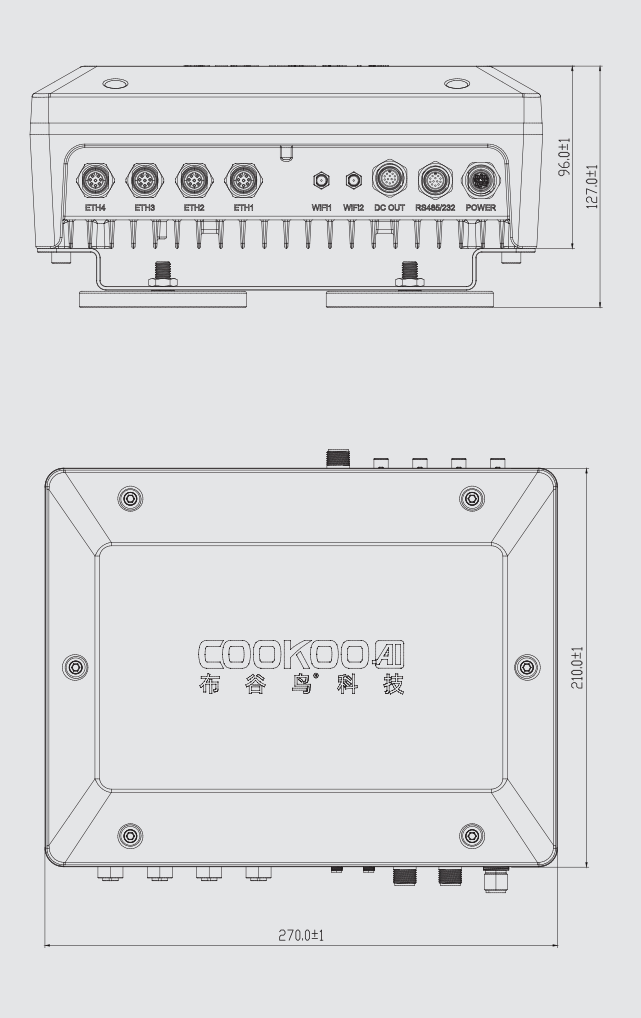
| 防护等级 | IP 65 |
| 净重 | 约5.3kg |

扫码关注,获取最新信息
Copyright © 2026.布谷鸟同创科技. 津ICP备2026005702号-1